How Can We Help?
Abnormal functionning
The EyeSee drone includes different mechanisms to ensure the safety of users and the integrity of the drone.
These behaviors (or Failsafes) are triggered in flight, the application displays a message to identify the cause.
These are the failsafe resolutions:
 UWB connexion problem:
UWB connexion problem:
- The drone is in the wrong direction with respect to the terminals.
- The drone can shift up to 4m before resting.
- A terminal was moved during the flight.
To solve this problem:
- Check that the router has started up and that the 2 EyeSee Tag terminals on the ground are lighting up and flashing.
- Check that the placement of the 2 tags is consistent with the mode selected in the application.
- Check that they are not too far from the drone, move them closer if possible (a distance of about 30m (90ft) +/- 5m (15ft) generates very good results)..
 Obstacle detection:
Obstacle detection:
- An obstacle has been detected: less than 80cm on one side of the drone or less than 50cm behind the drone or less than 30cm in front of the drone (adjustable parameters in the Settings menu of the EYESEE application on the tablet).
- A message is displayed on the tablet, indicating the problem detected.
- Warning: currently the drone does not detect objects that go faster than 1m/sec.
To solve this problem:
- The drone must shift and land.
- Remove the obstacle and / or reconfigure the mission.
 Connexion problem between the drone and the tablet
Connexion problem between the drone and the tablet
- A message is displayed on the tablet, indicating the problem detected “Communication problem”.
To solve this problem:
- The drone must land.
- Check that the green terminal is on and charged. Check that the LEDs on the white box are on.
- Check that the tablet has active WiFi, and connected to the DevStation network.
 Operation out of scope (sonar)
Operation out of scope (sonar)
For example: 3 empty locations next to each other.
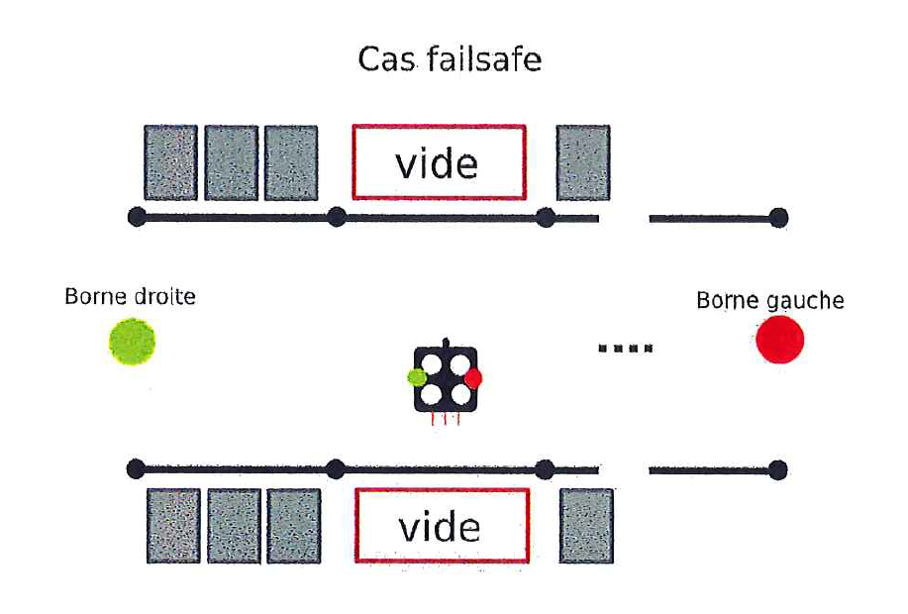
- Case where the drone is in front of a column containing 3 consecutive empty locations with in addition to the vacuum at the back of the drone for more than 3 seconds.
- A message is displayed on the tablet stating “Sonar problem”.
- Warning: the drone may accelerate its descent speed if there is too much space around it.
To solve this problem:
- The drone must land.
 Loss of the optical flow
Loss of the optical flow
- A message is displayed stating “Optical Flow Problem”.
To solve this problem:
- The drone must land.
- Check that the sensors under the drone are clean.
- If not, clean them carefully with a dry microfiber cloth.
 Loss of TeraRanger
Loss of TeraRanger
- The drone was able to fly over something over 50cm high.
- A message on the tablet suggests to the operator to move the drone and put it down.
- Warning in this case, the flight accuracy of the drone is less good.
To solve this problem:
- Check that the sensors under the drone are clean.
- If not, clean them carefully with a dry microfiber cloth.
- The operator must move the drone (right and left buttons) and put it down.
 Maximum altitude reached
Maximum altitude reached
- The drone came into contact with something that disturbed it.
To solve this problem:
- The drone lands automatically.
- Check the maximum altitude and/or the consistency of the mission with the mission location.
 EKF ou Real Time
EKF ou Real Time
- These failsafes can happen unexpectedly; they are the result of a sum of errors in the autopilot that end up being potentially critical.
To solve this problem:
- The drone must land.
- In general, all you have to do is restart the drone and continue the mission.
 The drone is too close to one of the two terminals
The drone is too close to one of the two terminals
- A message is displayed stating “Geo Fence”.
To solve this problem:
- The drone must land.
- Move the drone at least 5m (15ft) away from the terminals (default value).