How Can We Help?
Execute a mission
- In flight

![]() Pause mode during the mission
Pause mode during the mission
![]() Request to land before the end of the mission
Request to land before the end of the mission
![]() Percentage of drone battery and remaining flight time.
Percentage of drone battery and remaining flight time.
![]() Location code and progress bar. Number of steps performed / Total number of steps
Location code and progress bar. Number of steps performed / Total number of steps
- Execution of a mission, in flight/case of successful barcode reading

- The location code turns green when the code is read.
- The read barcode appears here
- Indicates the number of mandatory acquisitions to be read / on the number of acquisitions read
- Execution of a mission, in flight/case of non-reading of a code on a non-empty location
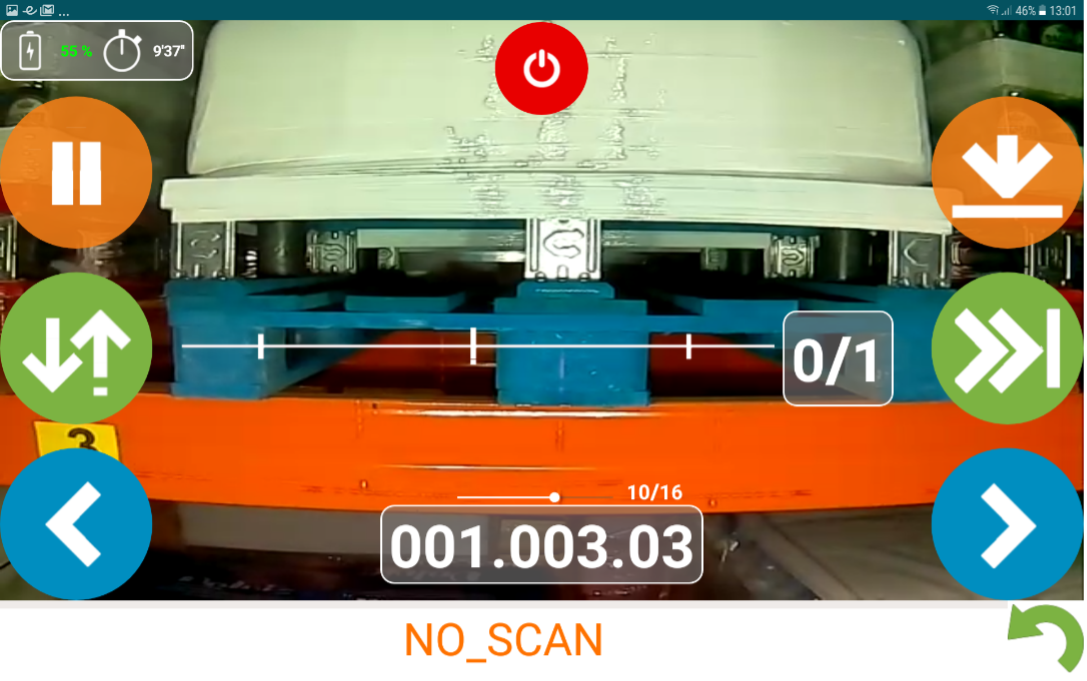
![]() Pause mode during the mission
Pause mode during the mission
![]() Request to land before the end of the mission
Request to land before the end of the mission
![]() Gives the order to restart the flight stage
Gives the order to restart the flight stage
![]() Validate the system proposal and proceed to the next step
Validate the system proposal and proceed to the next step
![]() Allows you to move the drone to the left (see parameter setting)
Allows you to move the drone to the left (see parameter setting)
![]() Allows you to move the drone to the right (see parameter setting)
Allows you to move the drone to the right (see parameter setting)
![]() Allows you to switch the choice of drone from NO_SCAN to EMPTY or from EMPTY to NO-SCAN.
Allows you to switch the choice of drone from NO_SCAN to EMPTY or from EMPTY to NO-SCAN.
In the case of a “mission restart” request, the drone will automatically start reading from the first unread barcode before the mission is interrupted and then continue with the remaining mission barcodes.
The possible values are :
« NO_SCAN » When the location is not empty and reading is not possible (absence of the label, unreadable label etc.).
« EMPTY » If the location is empty.
- Case of an obstacle detected under the drone

![]() Allows you to move the drone to the left (see parameter setting).
Allows you to move the drone to the left (see parameter setting).
![]() Allows you to move the drone to the right (see parameter setting)
Allows you to move the drone to the right (see parameter setting)
In case of detection of an obstacle under the drone the mission is stopped, and the drone remains in hover flight.
The mission cannot be resumed without a landing of the drone.
In this situation the tablet vibrates and emits “beeps” indicating an abnormal situation.
It is the operator’s responsibility to release the area under the drone or to delay it to ensure the availability of the landing area and to give the landing order.